
به گزارش پرشین خودرو به نقل از ایسنا، مهندسان دانشگاه استنفورد یک دستکش الکترونیکی را توسعه دادهاند که میتواند به رباتها حس لامسه دهد.
این اختراع جدید از حسگرهای پیشرفته برخوردار است که میتوانند به دستهای رباتیک اجازه دهند که اشیایی به ظرافت یک تمشک را بدون آسیب برداشته و جابهجا کنند.
تقلید از پوست انسان
"ژنان بائو" مهندس شیمی دانشگاه استنفورد و سرپرست این پروژه گفت: این فناوری، ما را در راهی قرار میدهد که روزی بتوانیم به رباتها نوعی از قابلیتهای سنجش در پوست انسان را ببخشیم. این فناوری به معنای واقعی کلمه تقلید از شیوههایی است که لایههای پوست انسان در دستها برای القای حس لامسه استفاده میکند.
برای رسیدن به این فناوری، "بائو" و همکارانش، پایه مکانیزم خود را روی خاره (spinosum) قرار دادند که یک لایه فرعی پر از برآمدگی از پوست انسان است که برای تشخیص فشار، حرارت و سایر محرکهای مربوط به لمس، با لایه بیرونی همکاری میکند.
یکی از زمینههایی که محققان به طور خاص بر آن تمرکز کردند، ساختاری است که به انسان اجازه میدهد که نیروی برش (shear force) را حس کند. این قابلیت منحصر به فرد است که به انسان اجازه میدهد تا بداند چه چیزهایی را باید با چه مقدار نیرو نگه دارد تا به اشیاء با ویژگی مختلف بیش از حد فشار نیاید و یا آنها را رها نکند.
تیم استنفورد با الهام از این قابلیت، حسگرهایی ساخت که از سه لایه انعطاف پذیر شامل بخشهای فعال الکتریکی بالا و پایین و همچنین یک عایق لاستیکی در وسط ساخته شده است.
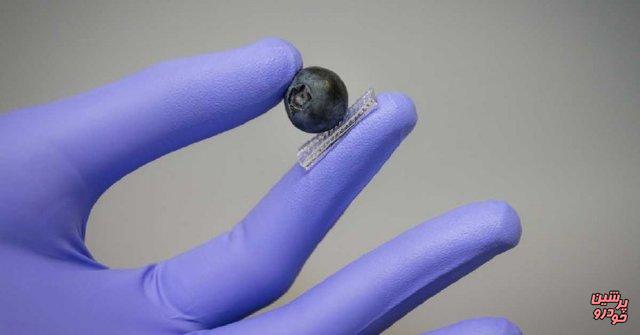
آنها سپس این سنسورها را روی یک دستکش لاستیکی قرار دادند که روی دست رباتیک قرار میگیرد و انگشتان رباتیک را ایجاد میکند. این انگشتان مانند دست انسان قادر به تشخیص میزان فشار لازم بر جسم و حمل بدون آسیب آن هستند.
تا کنون "بائو" و تیمش این دستکش رباتیک را با موفقیت برنامهریزی کردهاند که با خیال راحت بتواند یک تمشک را بدون فشار اضافی لمس کند و همچنین یک توپ پینگ پنگ را بدون شکستن یا رها کردن، جابهجا کند. در هر دو مورد، حسگرها توانستند نیروی برش مناسب را شناسایی کنند تا این اشیاء، بدون آسیب یا رها شدن لمس و حمل شوند.
محققان در حال حاضر امیدوارند که این حسگرها را مستقیما در یک پوشش مخصوص به شکل پوست مخصوص رباتها تعبیه کنند.
شناسایی اشیاء
برنامههای کاربردی آینده تقریبا نزدیک به بینهایت خواهند بود، چرا که این حسگرها از صنایع مختلف تا پزشکی کاربرد دارند.
این فناوری میتواند روزی رباتها را برای قرار دادن تخم مرغ روی یک تسمه نقاله یا کمک به جراحیهای پیچیده که نیاز به لمس دقیق و با ثبات دارند، به کار گیرد.
با این حال، "بائو" میگوید هدف نهایی، ابداع حسگرهایی است که در واقع بتوانند اشیاء را شناسایی کنند. وی گفت: ما اکنون میتوانیم یک دست رباتیک را برای لمس بدون آسیب یک تمشک یا رها کردن آن برنامهریزی کنیم، اما ما میخواهیم ربات بتواند خودش از طریق لمس کردن، تشخیص دهد که چه چیزی را لمس میکند و در واقع ربات را قادر به انتخاب کنیم.
این مطالعه در Science Robotics منتشر شده است.
نظر شما